Observer Node: Raspberry Pi + Wio SX1262¶
A cheap Raspberry Pi paired with a Wio SX1262 LoRa module makes a capable MeshCore observer you can leave plugged in anywhere there's power and WiFi. Once deployed, it requires no hands-on access - you manage it remotely over SSH.
Affiliate links
Amazon links on this page use our affiliate tag. You pay the same price - commissions go directly toward hardware for CSRA community relay nodes. If you're buying anyway, many thanks for using our links!
What It Does¶
This build is aimed at locations where you want a persistent, low-maintenance presence on the mesh without leaving an expensive node unattended. A few good uses:
- Feed MQTT observer networks like letsmesh.net and Corescope with live mesh data
- Host meshcore-bot for automated mesh testing
- Provide a remote WiFi companion endpoint for testing new configs
- Stay accessible over SSH via WireGuard even after deployment
Parts List¶
Prices as of Feb 2026.
| Part | Price | |
|---|---|---|
| Raspberry Pi Zero 2W | ~$18 | Amazon Digikey |
| Wio SX1262 Dev Board | ~$5 | Seeed Studio |
| 64GB microSD card | ~$12 | Amazon |
| 5V 2.5A microUSB power supply | ~$8 | Amazon |
| Female-to-female jumper wires | ~$2 | Amazon |
Total: ~$45
Any Pi works
The Zero 2W is the lowest-cost option and plenty capable for this use case. Any larger Pi (3, 4, 5) will work fine - the wiring and software setup is identical. A bigger Pi may already be sitting in a drawer.
Pi prices are volatile right now (July 2026)
As of July 2026, Raspberry Pi supply issues have pushed street prices well above MSRP - the Zero 2W in particular is often scalped far past its ~$18 list price or simply out of stock. A Pi may no longer be the cheapest path. Some options:
- Check stock, not just price. Use rpilocator.com to find authorized resellers selling at or near MSRP before paying a scalper premium.
- Use a Pi you already own. Any 3/4/5 in a drawer works with identical wiring and setup, so buying nothing beats any price.
- Consider a Pi alternative. Similar single-board computers (Radxa Zero, Orange Pi Zero, Libre Le Potato, etc.) can run the same software. Wiring pin numbers and GPIO setup will differ from the table below, so you'll need to map pins for your board.
- Wait it out. If the build isn't urgent, prices tend to normalize once supply recovers - watch rpilocator and buy when a board hits list price.
Get the version with header pins
The Pi Zero 2W is sold with and without GPIO header pins soldered. Get the version with headers pre-soldered - it saves a soldering step and makes attaching jumper wires straightforward.
You'll also want a small plastic enclosure - since this is an indoor build with no weatherproofing requirements, a basic project box works fine.
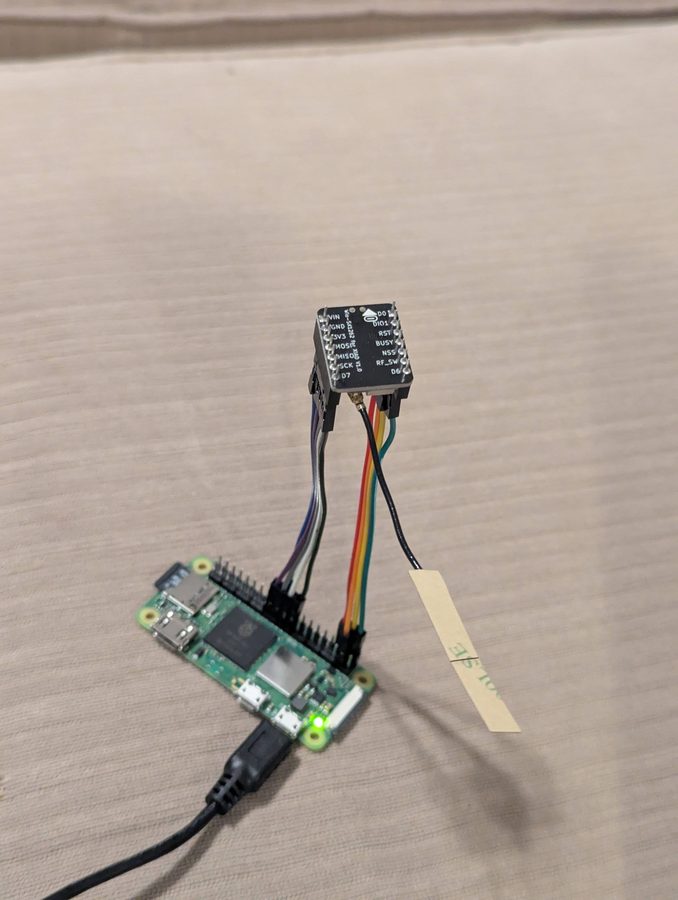
Wiring the Pi and SX1262¶
The SX1262 connects to the Pi's SPI bus plus a few GPIO pins for control signals. The table below uses the Wio SX1262 pin numbering where R1 is the top-right pin and L1 is the top-left.
| SX1262 Pin | Function | Pi Pin | BCM GPIO |
|---|---|---|---|
| R2 GND | Ground | Pin 20 | - |
| R3 3V3 | 3.3V Power | Pin 17 | - |
| R4 MOSI | SPI MOSI | Pin 19 | GPIO10 |
| R5 MISO | SPI MISO | Pin 21 | GPIO9 |
| R6 SCK | SPI Clock | Pin 23 | GPIO11 |
| L2 DIO1 | IRQ | Pin 36 | GPIO16 |
| L3 NRST | Reset | Pin 37 | GPIO26 |
| L4 BUSY | Busy | Pin 38 | GPIO20 |
| L5 NSS | SPI CE0 | Pin 40 | GPIO21 |
Pin references
A pinout diagram for the Pi Zero 2W is available at pinout.xyz. The SX1262 board's silkscreen labels match the table above.
Setting Up the SD Card¶
Use Raspberry Pi Imager to flash the card. Under OS, choose Raspberry Pi OS (other) - Raspberry Pi OS Lite (64-bit).
In the imager's customization settings before writing:
- Enter your WiFi credentials
- Set a hostname
- Add your SSH public key for access
Configuring the Pi¶
Pop the SD card in, power up, and find the Pi's IP on your network. SSH in, then run:
Navigate to Interface Options - SPI - Yes to enable SPI for the SX1262.
Then install packages:
sudo apt update && sudo apt install -y vim procps jq rpi-usb-gadget openresolv wireguard docker.io docker-compose
Enable USB gadget mode (lets you SSH over a direct USB cable if you need to reconfigure a deployed unit without network access):
Add the pi user to the docker group, then reboot to apply SPI, gadget, and group changes:
Software¶
WireGuard¶
If you already run a WireGuard server, generate a new client config and copy it to the Pi at /etc/wireguard/wg.conf. Tweak [Peer] AllowedIPs to limit the tunnel to only your VPN subnet (e.g. 10.8.0.0/24) - there's no reason this device needs a route to the wider internet through the tunnel.
Verify connectivity using the WireGuard IP rather than the local IP once it's up.
Untrusted device consideration
These units may be in locations you don't fully control. Consider treating them as untrusted clients on your VPN - restricting them so they can only respond to inbound connections rather than initiate new ones. On a wg-easy setup, you can do this with iptables rules in WG_POST_UP/WG_POST_DOWN:
WG_POST_UP=iptables -I FORWARD -i wg0 -s 10.8.0.9 -m conntrack --ctstate NEW -j DROP; iptables -I INPUT -i wg0 -s 10.8.0.9 -m conntrack --ctstate NEW -j DROP
WG_POST_DOWN=iptables -D FORWARD -i wg0 -s 10.8.0.9 -m conntrack --ctstate NEW -j DROP; iptables -D INPUT -i wg0 -s 10.8.0.9 -m conntrack --ctstate NEW -j DROP
Replace 10.8.0.9 with the actual IP allocated to your device. These rules need to be updated for each new unit.
Captive Portal Handling (optional)¶
Some locations use a captive portal that requires a browser-style login before granting internet access. The script below handles one particular portal type - you'll likely need to customize it for your location. Skip this section if your deploy site has open WiFi.
The script is written to run every minute from cron but throttles itself: it checks every minute for the first 10 minutes after boot, then backs off to every 10 minutes.
/home/pi/connect.py
#!/usr/bin/env python3
"""
Check for a captive portal and log in to gain internet connectivity.
Runs from cron every minute but throttles after first 10 minutes of uptime.
"""
import requests
import re
import sys
import time
def get_uptime_seconds():
with open('/proc/uptime', 'r') as f:
return float(f.readline().split()[0])
try:
with open('last_connect_run.txt', 'r') as f:
last_run = float(f.readline().strip())
time_since_last_run = time.time() - last_run
except:
time_since_last_run = 99999999
if get_uptime_seconds() > 60 * 10:
if time_since_last_run < 60 * 10:
print(f'only {time_since_last_run:.0f} seconds since last run...waiting...')
sys.exit(0)
with open('last_connect_run.txt', 'wt') as f:
f.write(str(time.time()))
session = requests.Session()
headers = {"User-Agent": "Mozilla/5.0 Chrome/145 Safari/537.36"}
test_url = "http://google.com"
print("STEP 1: trigger captive portal")
r = session.get(test_url, headers=headers, allow_redirects=False)
login_url = re.search(r"LoginURL>(.*?)</LoginURL>", r.text)
if not login_url:
print("no captive portal found - done!")
sys.exit(0)
login_url = login_url.group(1)
print("Login URL:", login_url)
print("STEP 2: load splash page")
r2 = session.get(login_url, headers=headers)
print("STEP 3: call grant")
grant_url = re.sub(r"\?.*", "", login_url) + "grant?continue_url=http://google.com"
r3 = session.get(grant_url, headers={**headers, "Referer": login_url})
print("Grant status:", r3.status_code)
Make it executable:
Add to the pi's crontab (sudo crontab -e):
Note
The ping line keeps the WireGuard tunnel alive by generating outbound traffic. This is a workaround for a firewall config issue and may not be needed in your setup.
openHop Repeater¶
openHop Repeater (formerly pyMC_Repeater) is the core software - it handles communication with the SX1262 over SPI and provides a companion TCP interface that meshcore-bot and other tools can connect to.
git clone https://github.com/openhop-dev/openhop_repeater.git
cd openhop_repeater
cp config.yaml.example config.yaml
Edit config.yaml. The SX1262 section should match your wiring from the table above:
sx1262:
bus_id: 0
busy_pin: 20
cs_id: 0
cs_pin: 21
dio3_tcxo_voltage: 1.8
irq_pin: 16
is_waveshare: true
reset_pin: 26
rxen_pin: 12
rxled_pin: -1
txen_pin: 13
txled_pin: -1
use_dio2_rf: false
use_dio3_tcxo: true
Update docker-compose.yml to expose the SPI and GPIO devices:
services:
openhop-repeater:
build: .
container_name: openhop-repeater
restart: unless-stopped
ports:
- 8000:8000
- 5000:5000
- 5001:5001
devices:
- /dev/spidev0.0
- /dev/spidev0.1
- /dev/gpiochip0
- /dev/gpiochip4
- /dev/gpiomem
cap_add:
- SYS_RAWIO
group_add:
- plugdev
volumes:
- ./config.yaml:/etc/openhop_repeater/config.yaml
- ./data:/var/lib/openhop_repeater
Start it:
meshcore-bot¶
meshcore-bot connects to the companion interface exposed by openHop Repeater and provides automated mesh testing and bot functionality.
cd ~
git clone https://github.com/agessaman/meshcore-bot.git
cd meshcore-bot
mkdir -p data/{backups,config,databases,logs}
cp config.ini.minimal-example data/config/config.ini
ln -s data/config/config.ini .
Edit config.ini:
[Connection]
connection_type = tcp
hostname = 127.0.0.1
tcp_port = 5000
[Bot]
bot_name = YourNode-bot
advert_interval_hours = 1
startup_advert = zero-hop
In docker-compose.yml, uncomment the network_mode: host block and remove the :ro suffix on the config volume mount. Then start it the same way as openHop Repeater.
Preparing for Deployment¶
Before taking the unit to its final location, add the destination's WiFi credentials:
Set the new network to auto-connect. If you're deploying to multiple locations, add all of them - the Pi will connect to whichever is available.
Also confirm that the WireGuard [Peer] Endpoint address is reachable from the deploy location's network, not just your home network.
Result¶
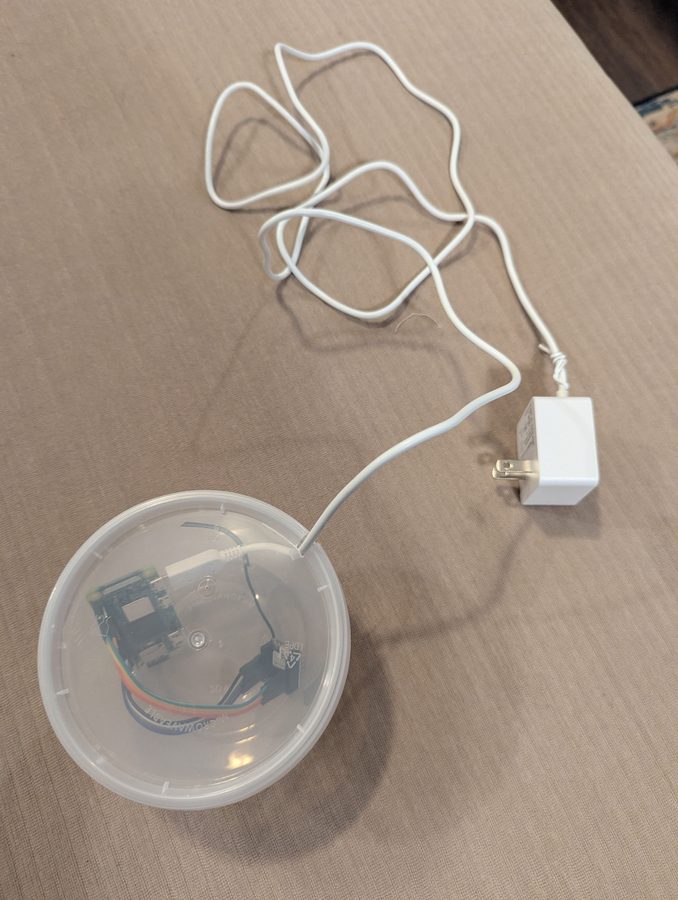
Plug the unit in, walk away, and SSH in via WireGuard whenever you need to make changes. The openHop Repeater and bot services restart automatically on reboot, and the captive portal script (if needed) handles reconnection after power cycles.
This is one example deployment
The steps above reflect a specific setup - particular software choices, a WireGuard server already in place, and deploy locations with a known captive portal. Your situation will likely differ. Treat this as a starting point: some sections (WireGuard, captive portal handling, meshcore-bot) may not apply to you at all, and others may need adjustment for your network environment, hosting preferences, or intended use.